Проект по робототехнике "Ступенькоход"
Индивидуальный исследовательский проект по робототехнике "Ступенькоход" содержит доступное описание проведенной учащимся работы по созданию модели робота–ступенькохода, который служит для перемещения людей с ОВЗ по лестничным маршам и пролетам.
Подробнее о проекте:
Творческая работа учащегося 11 класса о создании робота-помощника для колясочников подымает важный социальный вопрос о достижении независимости и самостоятельности людей с ОВЗ в сфере самообслуживания. По мнению автора проекта, для этого необходимо приспособить жилища и общественные здания к особенностям и специфическим потребностям инвалидов, то есть спроектировать устройство для беспрепятственного доступа инвалидов в любое помещение.
Готовая творческая работа по робототехнике на тему "Ступенькоход" демонстрирует этапы работы автора над сборкой робота-ступенькохода, используя конструктор Lego Mindstorms EV3. Изучив программное обеспечение данной версии конструктора, автор собрал запланированную модель и запрограммировал ее на передвижение по прямой и по лестничным маршам.
Оглавление
Введение
1. Изготовление робота-ступенькохода.
Выводы и практические рекомендации
Заключение
Список литературы
Приложения
Введение
В настоящие время перед современным обществом стоит непростая задача кардинального изменения отношения к людям с ограниченными возможностями здоровья путем создания им условий для самореализации, равных возможностей; разработки и внедрения различных способов и мер, позволяющих им полноценно осваивать социальный опыт, существующую систему общественных отношений.
Для этого необходимо создать систему эффективной социальной поддержки, включающей социальные, медицинские, педагогические, психологические разделы их реабилитации, позволяющих равноправно инвалидам входить в общество здоровых людей. Статус инвалида характеризуется социальной изоляцией, ограничением практически всех видов его жизнедеятельности. Преодоление социально-психологической дезадаптации инвалидов предполагает, прежде всего, изменение отношения общества к этой категории.
Актуальность. В настоящее время актуальной является проблема организации социальной поддержки людей с ограниченными возможностями. Участие в различных видах досуговой деятельности является необходимой областью социализации, самоутверждения и самореализации инвалидов, но ограничено, в связи с недостаточным уровнем развитости и доступности.
Часть инвалидов ограниченны в передвижении (маломобильны) и их миром являются стены квартиры. Много мероприятий, проводимых в районе на сегодняшний день, не предусматривают участия в них данной социальной группы.
Цель проекта: создать модель робот – ступенькоход, который служит для перемещения людей с ОВЗ по лестничным маршам и пролетам.
Задачи проекта:
- сконструировать модель робота, выполняющего функции подъемника;
- создать программу для робота, которая позволила бы ему двигаться по лестничным пролетам, перемещая людей с ОВЗ;
- Обеспечить доступ к жилому зданию и возможность перемещения внутри. Обеспечить безопасные лестницы для всех пользователей, в том числе и для людей пожилого возраста, детей, людей со сниженным зрением и проблемами моторно-двигательной сферы.
Субъект проекта: помощь людям с ограниченными возможностями при перемещении по лестничным пролетам в заданиях, не оборудованных лифтом.
Объект проекта: «Робот – ступенькоход».
Гипотеза: робототехника позволяет создавать роботов-помощников для социализации людей с ОВЗ.
Ожидаемые результаты:
- в ходе выполнения проекта будут созданы:
- модель «робот-ступенькоход»;
- программа, которая обеспечит работу робота;
- презентация проекта.
Методы реализации проекта:
- Объяснительно-иллюстративный – предъявление информации различными способами (объяснение, рассказ, беседа, инструктаж, демонстрация, работа с литературой и др);
- Эвристический – метод творческой деятельности (создание творческой модели);
- Проблемный – постановка проблемы и самостоятельный поиск её решения;
- Программированный – набор операций, которые необходимо выполнить в ходе выполнения практических работ (компьютерный практикум);
- Частично-поисковый – решение проблемных задач с помощью педагога;
- Поисковый – самостоятельное решение проблем.
Материальные ресурсы: конструктор с программным обеспечением Lego Mindstorms EV 3 – 1 основной набор+ 1 набор дополнительный.
Создание робота-ступенькохода
Почему возникла идея создать робот – ступенькоход? Дело в том, что на территории Новоорского района зарегистрировано 2740 человек с ограниченными возможностями, из них 102 ребенка.
Для достижения независимости и самостоятельности людей с ОВЗ в сфере самообслуживания необходимо приспособление жилищ и общественных зданий к особенностям и специфическим потребностям инвалидов, устройство для беспрепятственного доступа инвалидов в любое помещение.
Это пандусы при входе в здание, определенные типы, размеры и конструкции дверей и тамбуров, лифты и подъемники для инвалидов на кресло-колясках, дополнительные ограждения лестничных проемов, приспособления, облегчающее инвалидам самообслуживание в раздевальных, душевых и уборных помещениях. Данные мероприятия играют немаловажную роль, но здесь встает вопрос о том, как быть людям маломобильной группы внутри самого здания, если ему необходимо подняться на 2 или выше этажи и попасть к специалистам.
Чтобы ответить на этот вопрос, обратился в центр социального развития, где получил ответ:
- «Все социально-значимые учреждения оборудованы пандусами и кнопкой «Вызов специалиста».
Но подтвердилась проблема, которая возникает внутри здания-отсутствие лифта в социально - значимых учреждениях.
В помощь, людям, ограниченным в передвижении, мы решили изобрести робот-ступенькоход.
На подготовительном этапе инициативная группа изучила материал в Интернет - сети, о том, какие существуют приспособления для передвижения людей инвалидов. Выяснили, что существуют разные виды ступенькоходов.
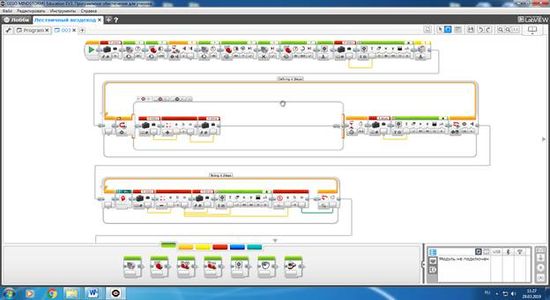
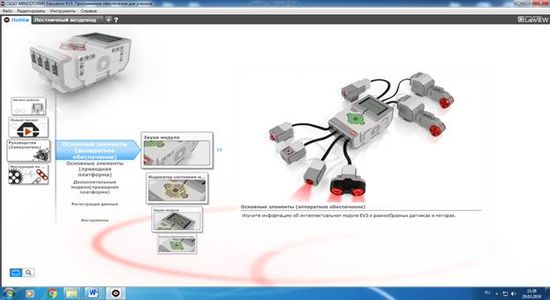
Занимаясь в творческом объединении «Рободем» с конструктором Lego Mindstorms EV3, изучил программное обеспечение к данной версии конструктора. Программа состоит из различных групп программных блоков. Блоки выстраиваются последовательно, при необходимости заключаются в цикл. Программа загружается через USB шнур.
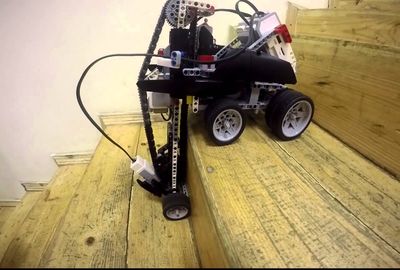
Из деталей конструктора собрал ходовую часть робота, установил аккумулятор, большие и средние моторы, датчик касания, гироскопический датчик, отвечающий за равновесие робота. Большой мотор осуществляет движение робота, что позволяет данной модели передвигаться не только по лестничным маршам, но и по ровной поверхности. Средний мотор отвечает за гусеничный ход, позволяющий перемещать заднюю часть робота в нужном направлении.
На этапе конструирования столкнулся с проблемой выбора диаметра колес для передвижения по ступеням (ведущие колеса передней части робота должны быть более мощными для устойчивого положения во время передвижения по ступенькам).
На следующем этапе (программировании) разработал программу, приводящую ступенькоход в движение с учетом встроенных датчиков.
Выводы и практические рекомендации
Мы задались вопросом:
- доволен ли результатами своей работы?
- нравится ли получившееся изделие?
- получит ли оно дальнейшее применение?
По результатам тестирования модели остался доволен выполненной работой, но пришел к выводу, что необходимо разработать механическую систему блокировки движения устройства на краю ступенек. Устройство решает серьезную задачу – обеспечивает безопасный и комфортный спуск-подъем по лестнице инвалида-колясочника там, где отсутствуют другие возможности, такие как лифт, пандус или стационарный подъемник.
Цель проекта достигнута, задачи в ходе работы выполнены полностью
Заключение
Мне кажется, что полученные навыки по робототехнике обязательно пригодятся в жизни. Можно не только изобретать роботов из готовых наборов, но и использовать подручные материалы для создания действующих моделей.
Надеюсь, что модель заинтересует инженеров, которые смогут реализовать мою идею в жизнь в промышленных масштабах. Такой робот станет незаменимым помощником людям с ограниченными возможностями здоровья, ведь качество жизни инвалидов показывает уровень развития и осознанности общества в целом. Поэтому создание безбарьерной среды заявлено как одно из приоритетных направлений в государственной политике.
И в сознании все большего количества людей появляется понимание по отношению к людям «с расширенными потребностями».
Список литературы
- Первый шаг в робототехнику: практикум для 5-6 классов/Д.Г.Копосов. М.: БИНОМ. Лаборатория знаний, 2012. – 87стр.
- Филиппов С.А. Робототехника для детей и родителей. – СПб.:Наука, 2010, 195 стр.
- Образовательная робототехника в дополнительном образовании школьников: Методическое пособие/ Гинзбург Е.Е., Винокурова А.В. – Йошкар-Ола: ОАНО «Инфосфера», 2011. – 32 стр.
- Программное обеспечение MINDSTORMSEV3.
- Первый шаг в робототехнику: рабочая тетрадь для 5-6 классов/ Д.Г.Копосов. М.: БИНОМ. Лаборатория знаний, 2012
- Филиппов С.А. Робототехника для детей и родителей. – СПб.: Наука, 2010,
- Образовательная робототехника в дополнительном образовании школьников/ Гинзбург Е.Е., Винокурова А.В. – Йошкар-Ола: ОАНО «Инфосфера», 2011
- Интернет ресурсы.
Программное обеспечение
1. Lego Mindstorms EV3.
Приложение 1


Приложение 2

Приложение 3


Приложение 4

Приложение 5